ذراع روبوت صناعي تعاوني، روبوت صناعي سداسي المحاور، روبوت تعاوني
ذراع روبوت صناعي تعاوني، روبوت صناعي سداسي المحاور، روبوت تعاوني
الفئة الرئيسية
ذراع روبوت صناعي / ذراع روبوت تعاوني / ماسك كهربائي / مشغل ذكي / حلول الأتمتة
طلب
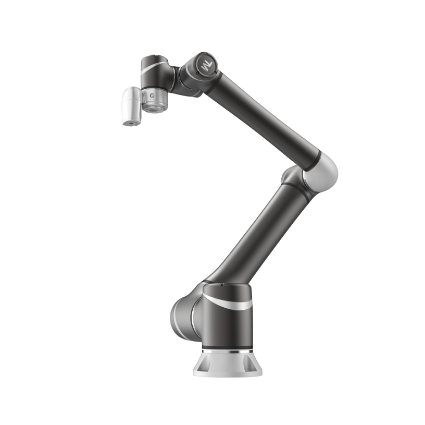
يتميز الروبوت TM12 بأطول مدى في سلسلة روبوتاتنا، مما يتيح التشغيل التعاوني حتى في التطبيقات التي تتطلب دقة وقدرات رفع على مستوى الصناعة. يحتوي على عدد من الميزات التي تسمح باستخدامه بأمان بالقرب من العمال، دون الحاجة إلى تركيب حواجز أو أسوار ضخمة. يُعد TM12 خيارًا ممتازًا لأتمتة الروبوتات التعاونية لتحسين المرونة وزيادة الإنتاجية.إنتاجية.
بفضل نظام الرؤية الرائد في فئته، وتقنية الذكاء الاصطناعي المتقدمة، والسلامة الشاملة، وسهولة التشغيل،سيساهم الروبوت التعاوني المدعوم بالذكاء الاصطناعي في تطوير أعمالك إلى آفاق لم يسبق لها مثيل.ارتقِ بالأتمتة إلى مستوى جديد من خلال تعزيز الإنتاجية وتحسين الجودة وخفض التكاليف.
سمات
ذكي
اجعل روبوتك التعاوني متطوراً في المستقبل باستخدام الذكاء الاصطناعي
• الفحص البصري الآلي (AOI)
• ضمان الجودة والاتساق
• زيادة كفاءة الإنتاج
• خفض تكاليف التشغيل
بسيط
لا يشترط وجود خبرة
• واجهة رسومية لتسهيل البرمجة
• سير عمل التحرير الموجه نحو العمليات
• توجيه يدوي بسيط لتعليم الوضعيات
• معايرة بصرية سريعة باستخدام لوحة المعايرة
آمن
السلامة التعاونية هي أولويتنا
• يتوافق مع معيار ISO 10218-1:2011 ومعيار ISO/TS 15066:2016
• نظام كشف التصادم مع زر التوقف الطارئ
• توفير تكلفة ومساحة الحواجز والأسوار
• تحديد حدود السرعة في مساحة العمل التعاونية
تستطيع الروبوتات التعاونية المدعومة بالذكاء الاصطناعي التعرف على بيئتها وأجزائها وتحديد اتجاهاتها لإجراء عمليات فحص بصرية ومهام التقاط ووضع ديناميكية. يمكن تطبيق الذكاء الاصطناعي بسهولة على خط الإنتاج لزيادة الإنتاجية وخفض التكاليف وتقليل أوقات الدورات. كما يمكن لتقنية الرؤية المدعومة بالذكاء الاصطناعي قراءة نتائج الآلات أو معدات الاختبار واتخاذ القرارات المناسبة بناءً على ذلك.
إلى جانب تحسين عمليات الأتمتة، يمكن للروبوت التعاوني المدعوم بالذكاء الاصطناعي تتبع البيانات وتحليلها ودمجها أثناء الإنتاج لمنع العيوب وتحسين جودة المنتج. عزز أتمتة مصنعك بسهولة باستخدام مجموعة متكاملة من تقنيات الذكاء الاصطناعي.
تم تجهيز روبوتاتنا التعاونية بنظام رؤية متكامل، مما يمنحها القدرة على إدراك محيطها، الأمر الذي يعزز قدراتها بشكل ملحوظ. تُعدّ رؤية الروبوت، أو القدرة على "رؤية" البيانات المرئية وتفسيرها إلى أوامر، إحدى الميزات التي تجعلنا متفوقين. إنها تُحدث نقلة نوعية في أداء المهام بدقة في بيئات العمل المتغيرة باستمرار، مما يجعل العمليات أكثر سلاسة، ويزيد من كفاءة عمليات الأتمتة.
صُمم الروبوت التعاوني المدعوم بالذكاء الاصطناعي مع مراعاة المستخدمين الجدد، فلا يشترط معرفة البرمجة للبدء باستخدامه. تُسهّل حركة السحب والإفلات البديهية باستخدام برنامج برمجة التدفق الخاص بنا عملية البرمجة. تتيح تقنيتنا الحاصلة على براءة اختراع للمشغلين، حتى بدون خبرة في البرمجة، برمجة مشروع في غضون خمس دقائق فقط.
ستتوقف الروبوتات الذكية المزودة بمستشعرات أمان مدمجة عند استشعار أي تلامس جسدي، مما يقلل من الأضرار المحتملة ويضمن بيئة عمل آمنة وخالية من الضغط. كما يمكنك تحديد سرعات الروبوت لاستخدامه في بيئات متنوعة بالقرب من عمالك.
المنتجات ذات الصلة



معلمات المواصفات
| نموذج | TM12 | |
| وزن | 32.8 كجم | |
| الحمولة القصوى | 12 كجم | |
| يصل | 1300 مم | |
| نطاقات مشتركة | J1، J6 | ±270° |
| J2، J4، J5 | ±180° | |
| J3 | ±166° | |
| سرعة | J1، J2 | 120 درجة/ثانية |
| J3 | 180 درجة/ثانية | |
| J4 | 180 درجة/ثانية | |
| J5 | 180 درجة/ثانية | |
| J6 | 180 درجة/ثانية | |
| السرعة النموذجية | 1.3 م/ث | |
| السرعة القصوى | 4 م/ث | |
| قابلية التكرار | ± 0.1 مم | |
| درجة الحرية | 6 مفاصل دوران | |
| الإدخال/الإخراج | صندوق التحكم | المدخلات الرقمية: 16 المخرج الرقمي: 16 المدخل التناظري: 2 المخرج التناظري: 1 |
| وصلة الأدوات | المدخلات الرقمية: 4 المخرج الرقمي: 4 المدخل التناظري: 1 خرج تناظري: 0 | |
| وحدة تزويد الطاقة للإدخال/الإخراج | 24 فولت 2.0 أمبير لصندوق التحكم و24 فولت 1.5 أمبير للأداة | |
| تصنيف الملكية الفكرية | IP54 (ذراع الروبوت)؛ IP32 (صندوق التحكم) | |
| استهلاك الطاقة | نموذجي 300 واط | |
| درجة حرارة | يمكن للروبوت العمل في نطاق درجة حرارة يتراوح بين 0 و50 درجة مئوية | |
| نظافة | الفئة 3 وفقًا لمعيار ISO | |
| مزود الطاقة | 100-240 فولت تيار متردد، 50-60 هرتز | |
| واجهة الإدخال/الإخراج | 3 منافذ COM، منفذ HDMI واحد، 3 منافذ LAN، 4 منافذ USB 2.0، منفذان USB 3.0 | |
| تواصل | RS232، إيثرنت، مودبوس TCP/RTU (رئيسي وتابع)، بروفينت (اختياري)، إيثرنت/IP (اختياري) | |
| بيئة البرمجة | TMflow، يعتمد على مخطط التدفق | |
| شهادة | CE، SEMI S2 (اختياري) | |
| الذكاء الاصطناعي والرؤية*(1) | ||
| وظيفة الذكاء الاصطناعي | التصنيف، اكتشاف الأجسام، التجزئة، اكتشاف الحالات الشاذة، التعرف الضوئي على الأحرف بالذكاء الاصطناعي | |
| طلب | تحديد المواقع، قراءة الرموز الشريطية أحادية وثنائية الأبعاد، التعرف الضوئي على الأحرف، كشف العيوب، القياس، فحص التجميع | |
| دقة تحديد المواقع | تحديد الموقع ثنائي الأبعاد: 0.1 مم*(2) | |
| العين في اليد (مدمجة) | كاميرا ملونة ذاتية التركيز بدقة 5 ميجابكسل، مسافة عمل من 100 مم إلى ما لا نهاية | |
| من العين إلى اليد (اختياري) | يدعم بحد أقصى كاميرتين ثنائيتي الأبعاد بسرعة جيجابت إيثرنت أو كاميرا ثنائية الأبعاد بسرعة جيجابت إيثرنت + كاميرا ثلاثية الأبعاد واحدة*(3) | |
| *(1)تتوفر أيضًا أذرع الروبوت TM12X وTM14X وTM16X وTM20X بدون أذرع رؤية مدمجة. *(2)تم قياس البيانات الواردة في هذا الجدول بواسطة مختبر TM، ومسافة العمل 100 مم. تجدر الإشارة إلى أنه في التطبيقات العملية، قد تختلف القيم ذات الصلة بسبب عوامل مثل مصدر الإضاءة المحيطة في الموقع، وخصائص الجسم، وطرق برمجة الرؤية، والتي ستؤثر على دقة القياس. *(3)يرجى الرجوع إلى الموقع الرسمي لـ TM Plug & Play لمعرفة طرازات الكاميرات المتوافقة مع TM Robot. | ||
أعمالنا


فئات المنتجات
-

ذراع روبوتية منخفضة التكلفة Szgh-Arm 2442co يد روبوتية 4...
-

ذراع روبوتية تعاونية أوتوماتيكية بستة محاور لـ...
-

ذراع روبوت طحن CNC سداسي المحاور لصناعة الألومنيوم...
-

ذراع روبوت اللحام سداسي المحاور من شركة Szgh الصناعية...
-

ذراع روبوت صناعي سداسي المحاور لصفائح المعادن...
-
روبوت تعاوني (Erc 612m/Erc 612) بست درجات...