روبوت مناول تعاوني Szgh-Arm 2442co لتحميل وتفريغ البضائع



روبوت مناول تعاوني Szgh-Arm 2442co لتحميل وتفريغ البضائع
الفئة الرئيسية
ذراع روبوت صناعي / ذراع روبوت تعاوني / ماسك كهربائي / مشغل ذكي / حلول الأتمتة
طلب
روبوتات SCIC Z-Arm التعاونية هي روبوتات خفيفة الوزن رباعية المحاور مزودة بمحرك قيادة داخلي، ولا تتطلب مخفضات سرعة مثل الروبوتات التقليدية، مما يقلل التكلفة بنسبة 40%. تستطيع روبوتات SCIC Z-Arm تنفيذ وظائف متنوعة، تشمل على سبيل المثال لا الحصر، الطباعة ثلاثية الأبعاد، ومناولة المواد، واللحام، والنقش بالليزر. وهي قادرة على تحسين كفاءة ومرونة العمل والإنتاج بشكل كبير.
سمات

دقة عالية
قابلية التكرار
±0.02 مم
حمولة كبيرة
5 كجم
طول ذراع كبير
محور JI 220 مم
محور J2 200 مم
سعر تنافسي
جودة على المستوى الصناعي
Cسعر تنافسي
المنتجات ذات الصلة



معلمات المواصفات
تم تصميم ذراع SCIC Z-Arm 2442B من قبل شركة SCIC Tech، وهو روبوت تعاوني خفيف الوزن، سهل البرمجة والاستخدام، ويدعم حزمة تطوير البرامج (SDK). بالإضافة إلى ذلك، فهو يدعم خاصية اكتشاف التصادم، أي أنه يتوقف تلقائيًا عند ملامسة الإنسان، مما يوفر تعاونًا ذكيًا بين الإنسان والآلة، مع مستوى عالٍ من الأمان.
| ذراع الروبوت التعاوني Z-Arm 2442B | حدود |
| طول ذراع المحور 1 | 220 مم |
| زاوية دوران المحور 1 | ±90° |
| طول ذراع المحورين | 200 مم |
| زاوية دوران محورين | ±164° (اختياري: 15-345 درجة) |
| شوط المحور Z | 240 (يمكن تعديل الارتفاع) |
| نطاق دوران المحور R | ±1080° |
| السرعة الخطية | 1600 مم/ث (حمولة 4 كجم) |
| قابلية التكرار | ±0.02 مم |
| الحمولة القياسية | 4 كجم |
| الحمولة القصوى | 5 كجم |
| درجة الحرية | 4 |
| مزود الطاقة | 220 فولت/110 فولت 50-60 هرتز، قابل للتكيف مع 48 فولت تيار مستمر، طاقة قصوى 200 واط |
| تواصل | إيثرنت |
| قابلية التوسع | وحدة تحكم الحركة المدمجة توفر 24 منفذ إدخال/إخراج بالإضافة إلى إمكانية التوسعة تحت الذراع |
| يمكن تخصيص ارتفاع المحور Z | 0.1 متر - 0.5 متر |
| تعليم السحب على المحور Z | / |
| واجهة كهربائية محجوزة | التكوين القياسي: 24 سلكًا من نوع 23awg (غير محمية) من لوحة المقبس عبر غطاء الذراع السفلي اختياري: أنبوبان مفرغان بقطر 4 بوصات يمران عبر لوحة المقبس والشفة |
| مقابض كهربائية متوافقة مع HITBOT | E-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| ضوء التنفس | / |
| نطاق حركة الذراع الثاني | قياسي: ±164 درجة، اختياري: 15-345 درجة |
| ملحقات اختيارية | / |
| بيئة الاستخدام | درجة الحرارة المحيطة: 0-45 درجة مئوية الرطوبة: 20-80% رطوبة نسبية 85 (بدون صقيع) |
| مدخل رقمي لمنفذ الإدخال/الإخراج (معزول) | 9+3+تمديد الساعد (اختياري) |
| مخرج رقمي لمنفذ الإدخال/الإخراج (معزول) | 9+3+تمديد الساعد (اختياري) |
| مدخل تناظري لمنفذ الإدخال/الإخراج (4-20 مللي أمبير) | / |
| مخرج تناظري لمنفذ الإدخال/الإخراج (4-20 مللي أمبير) | / |
| ارتفاع ذراع الروبوت | 683 ملم |
| وزن ذراع الروبوت | شوط 240 مم، وزن صافٍ 27 كجم |
| حجم القاعدة | 250 مم × 250 مم × 15 مم |
| المسافة بين فتحات تثبيت القاعدة | 200 مم × 200 مم مع أربعة براغي M8 × 20 |
| كشف التصادم | √ |
| تعليم فنون الدراج | √ |
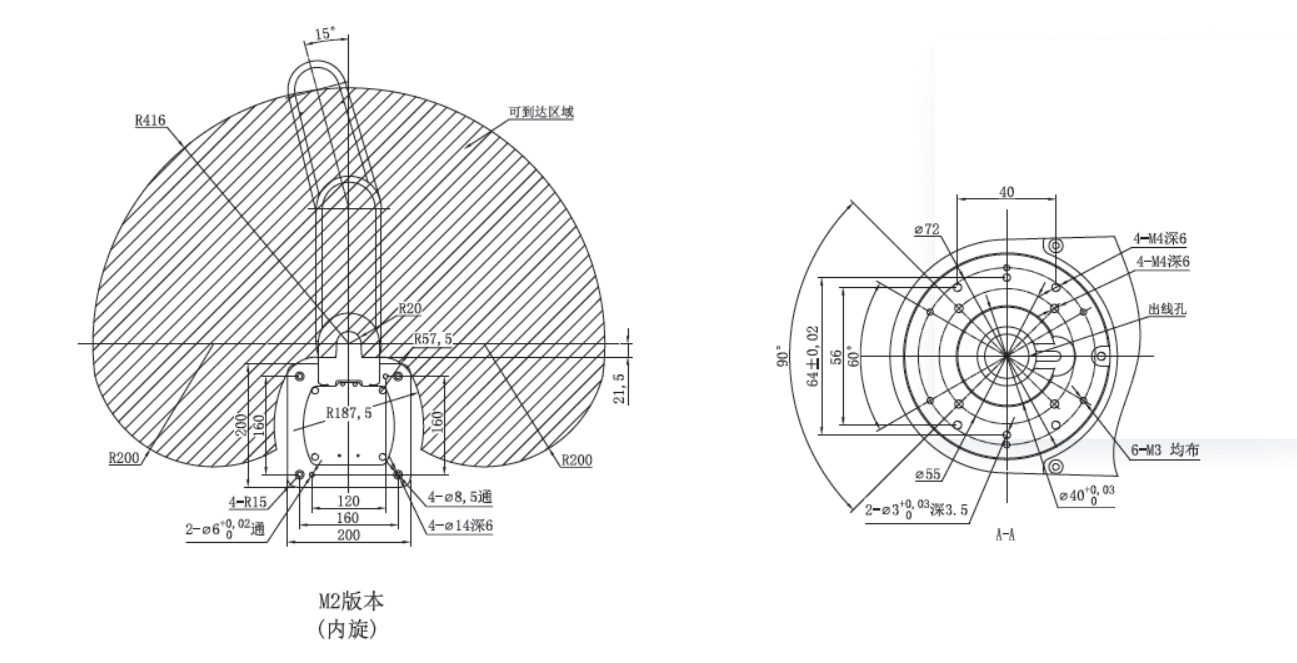
نطاق الحركة M1 الإصدار (الدوران للخارج)
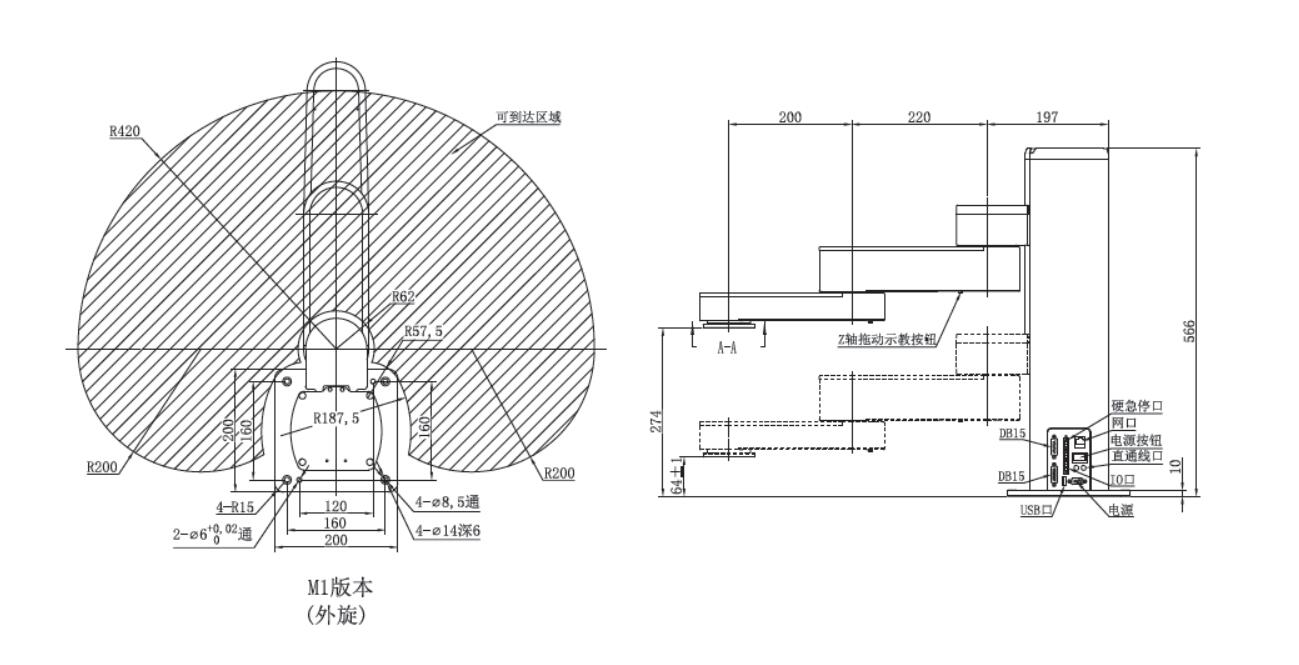
مقدمة عن واجهة المستخدم

يتم تثبيت واجهة ذراع الروبوت Z-Arm 2442 في موقعين، جانب قاعدة ذراع الروبوت (المحدد بـ A) والجزء الخلفي من الذراع النهائي. تحتوي لوحة التوصيل عند النقطة A على واجهة مفتاح الطاقة (JI)، وواجهة تزويد الطاقة 24 فولت DB2 (J2)، ومنفذ إخراج إلى منفذ إدخال/إخراج المستخدم DB15 (J3)، ومنفذ إدخال/إخراج المستخدم DB15 (J4)، وأزرار تكوين عنوان IP (K5). بالإضافة إلى منفذ إيثرنت (J6)، ومنفذ إدخال/إخراج النظام (J7)، ومقبسين سلكيين مستقيمين رباعيي النواة J8A وJ9A.
احتياطات
1. قصور الحمولة
يوضح الشكل 1 مركز ثقل الحمولة ونطاق الحمولة الموصى به مع عزم القصور الذاتي لحركة المحور Z.

الشكل 1: وصف حمولة سلسلة XX32
2. قوة التصادم
قوة تشغيل الحماية من تصادم المفصل الأفقي: قوة سلسلة XX42 هي 40 نيوتن.
3. القوة الخارجية على المحور Z
يجب ألا تتجاوز القوة الخارجية للمحور Z 120 نيوتن.

الشكل 2
4. ملاحظات حول تركيب محور Z المخصص، انظر الشكل 3 لمزيد من التفاصيل.

الشكل 3
ملاحظة تحذيرية:
(1) بالنسبة للمحور Z المُخصص ذي الشوط الكبير، تقل صلابة المحور Z مع زيادة الشوط. عندما يتجاوز شوط المحور Z القيمة الموصى بها، ويكون لدى المستخدم متطلبات صلابة معينة، وتكون السرعة أكبر من 50% من السرعة القصوى، يُنصح بشدة بتركيب دعامة خلف المحور Z لضمان تلبية صلابة ذراع الروبوت للمتطلبات عند السرعات العالية.
القيم الموصى بها هي كالتالي: سلسلة Z-ArmXX42، شوط المحور Z > 600 مم
(2) بعد زيادة شوط المحور Z، ستنخفض استقامة المحور Z والقاعدة بشكل كبير. إذا لم تكن متطلبات الاستقامة الصارمة للمحور Z والقاعدة المرجعية قابلة للتطبيق، فيُرجى استشارة الفني المختص بشكل منفصل.
5. يُمنع توصيل كابل الطاقة أثناء التشغيل. سيصدر تحذير عكسي عند فصل القطبين الموجب والسالب لمصدر الطاقة.
6. لا تضغط على الذراع الأفقي عند إيقاف تشغيل الطاقة.

الشكل 4
توصية بشأن موصل DB15

الشكل 5
الموديل الموصى به: ذكر مطلي بالذهب مع غلاف من مادة ABS YL-SCD-15M، أنثى مطلية بالذهب مع غلاف من مادة ABS YL-SCD-15F
وصف المقاس: 55 مم × 43 مم × 16 مم
(انظر الشكل 5)
طاولة ماسكات متوافقة مع أذرع الروبوت
| رقم طراز ذراع الروبوت | مقابض متوافقة |
| XX42 T1 | Z-EFG-8S NK/Z-EFG-12 NK/Z-EFG-20 NM NMA/Z-EFG-20S/ Z-EFG-30NM NMA الطباعة ثلاثية الأبعاد ذات المحور الخامس |
| XX42 T2 | Z-EFG-50 ALL/Z-EFG-100 TXA |
مخطط حجم تركيب محول الطاقة
مزود طاقة RSP-500-SPEC-CN بتكوين XX42، 24 فولت، 500 واط

رسم تخطيطي لبيئة الاستخدام الخارجية لذراع الروبوت

أعمالنا


فئات المنتجات
-

ذراع روبوت اقتصادي بستة محاور مع نظام ميجميت إيهاف ...
-

ذراع تحكم متعدد المحطات بستة محاور من نوع Scara Rob...
-
أفضل سعر لماكينة لحام بذراع روبوتية سداسية المحاور...
-

ذراع روبوت CNC ذكي بستة محاور / ذراع ميكانيكي...
-

معدات اللحام الآلي الروبوتية لصناعة اللحام...
-
روبوت ميكانيكي ذو ذراع معدني بستة محاور، معروض للبيع بسعر مميز...