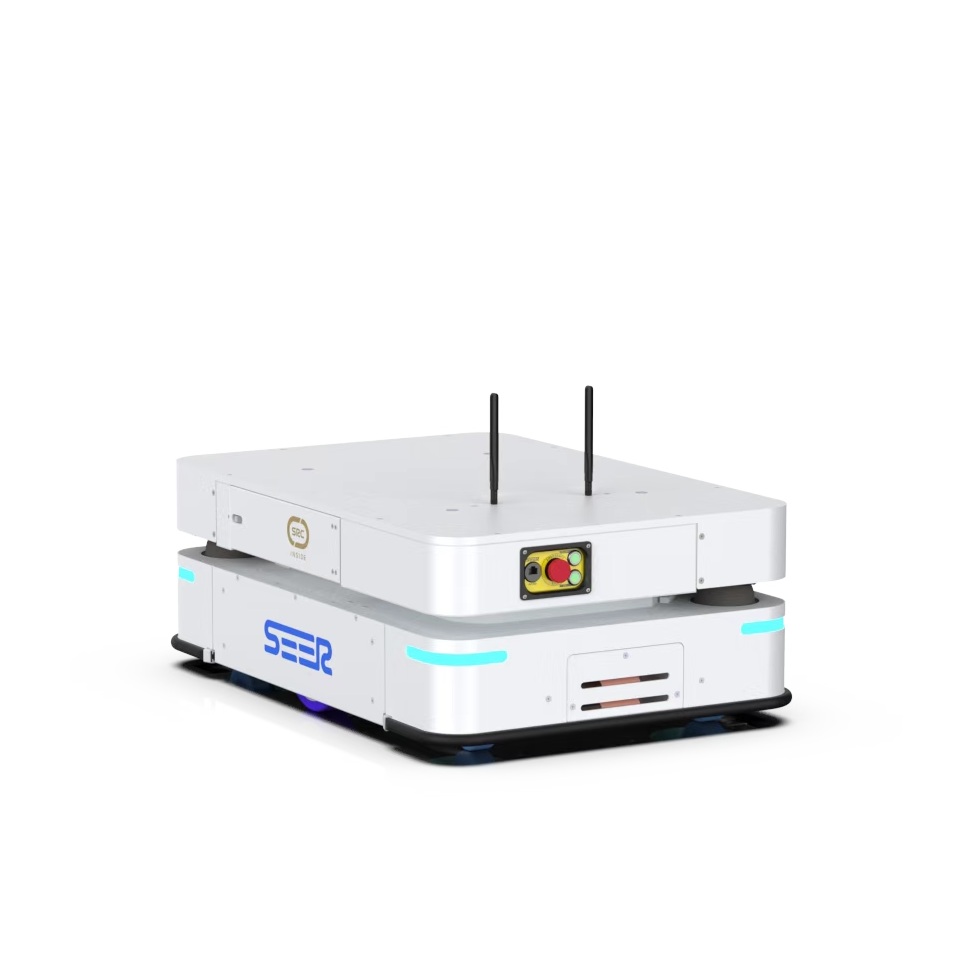
معيار AMRS – قواعد متنقلة تلقائية AMB-300XS

الفئة الرئيسية
مركبة AGV AMR / مركبة AGV AMR رافعة / مركبة AGV موجهة آلياً / روبوت متنقل ذاتي القيادة AMR / سيارة AGV AMR لمناولة المواد الصناعية / روبوت AGV مصنع في الصين / روبوت AMR للمستودعات / نظام ملاحة SLAM ليزري لرفع وخفض المواد / روبوت AGV AMR متنقل / نظام ملاحة SLAM ليزري لهيكل AGV AMR / روبوت لوجستي ذكي
طلب

هيكل AMB غير المأهول (AMB) للمركبات ذاتية القيادة (AGV)، وهو هيكل عالمي مصمم خصيصًا لهذه المركبات، يوفر ميزات مثل تحرير الخرائط وتحديد المواقع. يوفر هذا الهيكل غير المأهول لعربات AGV واجهات متعددة، مثل منافذ الإدخال/الإخراج وCAN، لتركيب وحدات علوية متنوعة، بالإضافة إلى برامج عميل قوية وأنظمة تحكم، مما يُسهّل على المستخدمين إتمام عمليات تصنيع وتطبيق مركبات AGV ذاتية القيادة بسرعة. يحتوي هيكل AMB غير المأهول على أربعة فتحات تثبيت في الجزء العلوي، مما يدعم التوسعات المتعددة باستخدام الرافعات، والبكرات، والمناولات، وأنظمة الجر، وشاشات العرض، وغيرها، لتحقيق استخدامات متعددة لهيكل واحد. وبالتكامل مع نظام SEER Enterprise Enhanced Digitalization، يُمكن لهيكل AMB تحقيق التوزيع والنشر الموحد لمئات من منتجات AMB في آنٍ واحد، مما يُحسّن بشكل كبير مستوى ذكاء الخدمات اللوجستية والنقل الداخلي في المصنع.
ميزة

• الحمولة المقدرة: 300 كجم
مدة التشغيل: 12 ساعة
رقم الليدار: 2
قطر الدوران: 972.6 مم
سرعة الملاحة: ≤1.5 متر/ثانية
دقة تحديد الموضع: ±5، 0.5 مم
● حاصل على شهادة السلامة CE، أداء متميز ومعايير سلامة ممتازة مصممة خصيصاً
توفر شهادة CE (ISO 3691-4:2020) أعلى مستوى من ضمان الجودة والسلامة، مما يدعم التصدير.
تم تخصيص منافذ الإدخال/الإخراج، وCAN، وRS485 وغيرها من المنافذ لتوسيع آلية المستوى الأعلى، والتي يمكنها تحقيق تطبيقات روبوتية متنوعة.
● تحديد دقيق للموقع بدقة ±5 مم
تساعد دقة تحديد المواقع في نظام الملاحة التي تبلغ ±5 مم وسرعة الملاحة التي تبلغ 1.5 م/ث الشركات على العمل بكفاءة.
● وظائف شاملة وتوسعة سهلة
تشمل الوظائف الأساسية تحرير الخرائط، وتحرير النماذج، وتحديد المواقع والملاحة، ونموذج الحركة الأساسي (التفاضلي)، والامتدادات الطرفية (البكرات، والرفع، والجر الكامن)، والواجهات، وما إلى ذلك.
● نظافة من الفئة 4، أكثر موثوقية
يجتاز اختبار النظافة ISO CLASS4، ويمكن استخدامه مباشرة في الصناعات التي تتطلب مستوى عالٍ من النظافة مثل صناعة أشباه الموصلات.
● كشف العوائق ثلاثية الأبعاد، أمان أكبر
يتم دعم خاصية الكشف عن العوائق ثلاثية الأبعاد والتوجيه باستخدام العاكسات لتعزيز أداء سلامة المنتج بشكل أكبر.



معلمات المواصفات
| نموذج المنتج | AMB-150 / AMB-150-D | AMB-300 / AMB-300-D | AMB-300XS | |
| المعايير الأساسية | طريقة الملاحة | تقنية الليزر SLAM | تقنية الليزر SLAM | تقنية الليزر SLAM |
| وضع القيادة | ترس تفاضلي ثنائي العجلات | ترس تفاضلي ثنائي العجلات | ترس تفاضلي ثنائي العجلات | |
| لون الغلاف | أبيض لؤلؤي / أسود لؤلؤي | أبيض لؤلؤي / أسود لؤلؤي | RAL9003 | |
| الطول × العرض × الارتفاع (مم) | 800*560*200 | 1000*700*200 | 842*582*300 | |
| قطر الدوران (مم) | 840 | 1040 | 972.6 | |
| الوزن (مع البطارية) (كجم) | 66 | 144 | 120 | |
| سعة التحميل (كجم) | 150 | 300 | 300 | |
| الحد الأدنى للعرض المسموح به (مم) | 700 | 840 | 722 | |
| معايير الأداء | ||||
| دقة تحديد الموقع في الملاحة (مم*) | ±5 | ±5 | ±5 | |
| دقة زاوية الملاحة (°) | ±0.5 | ±0.5 | ±0.5 | |
| سرعة الملاحة (م/ث) | ≤1.4 | ≤1.4 | ≤1.5 | |
| معايير البطارية | مواصفات البطارية (فولت/أمبير ساعة) | 48/35 (ليثيوم ثلاثي) | 48/52 (ليثيوم ثلاثي) | 48/40 (ليثيوم ثلاثي) |
| عمر البطارية الشامل (ساعة) | 12 | 12 | 12 | |
| مدة الشحن (10-80%) (10-80%) (ساعة) | ≤2 | ≤ 2.5 | ≤ 2.5 | |
| طريقة الشحن | يدوي/تلقائي/مفتاح | يدوي/تلقائي/مفتاح | يدوي/تلقائي/مفتاح | |
| واجهات موسعة | باور دو | سبعة منافذ (سعة الحمل الإجمالية 24 فولت / 2 أمبير) | سبعة منافذ (سعة الحمل الإجمالية 24 فولت / 2 أمبير) | ثلاثي الاتجاهات (سعة الحمل الإجمالية 24 فولت / 2 أمبير) |
| DI | شبكة ذات عشرة اتجاهات (NPN) | شبكة ذات عشرة اتجاهات (NPN) | أحد عشر اتجاهًا (PNP/NPN) | |
| واجهة إيقاف الطوارئ | مخرج ثنائي الاتجاه | مخرج ثنائي الاتجاه | مخرج ثنائي الاتجاه | |
| شبكة سلكية | منفذ إيثرنت جيجابت ثلاثي الاتجاهات RJ45 | منفذ إيثرنت جيجابت ثلاثي الاتجاهات RJ45 | إيثرنت جيجابت ثنائي الاتجاه M12 X-Code | |
| التكوينات | رقم الليدار | 1 أو 2 | 1 أو 2 | 2 (SICK nanoScan3) |
| شاشة عرض واجهة المستخدم الرسومية | ● | ● | - | |
| زر الإيقاف الطارئ | ● | ● | ● | |
| صفارة | ● | ● | - | |
| المتحدث | ● | ● | ● | |
| الإضاءة المحيطة | ● | ● | ● | |
| شريط المصد | - | - | ● | |
| الوظائف | تجوال شبكة الواي فاي | ● | ● | ● |
| الشحن التلقائي | ● | ● | ● | |
| التعرف على الرفوف | ● | ● | ● | |
| الملاحة باستخدام عاكس الليزر | 〇 | 〇 | 〇 | |
| تجنب العوائق ثلاثية الأبعاد | 〇 | 〇 | 〇 | |
| الشهادات | ISO 3691-4 | - | - | ● |
| التوافق الكهرومغناطيسي/التفريغ الكهروستاتيكي | ● | ● | ● | |
| UN38.3 | ● | ● | ● | |
| نظافة | - | الفئة الرابعة وفقًا لمعيار ISO | الفئة الرابعة وفقًا لمعيار ISO | |
* تشير دقة الملاحة عادةً إلى دقة التكرار التي يتنقل بها الروبوت إلى المحطة.
● قياسي 〇 اختياري لا شيء
أعمالنا







