أذرع SCARA الروبوتية - ذراع Z-Arm-4160B الروبوتية التعاونية





الفئة الرئيسية
ذراع روبوت صناعي / ذراع روبوت تعاوني / ماسك كهربائي / مشغل ذكي / حلول الأتمتة
طلب
روبوتات SCIC Z-Arm التعاونية هي روبوتات خفيفة الوزن رباعية المحاور مزودة بمحرك قيادة داخلي، ولا تتطلب مخفضات سرعة مثل الروبوتات التقليدية، مما يقلل التكلفة بنسبة 40%. تستطيع روبوتات SCIC Z-Arm تنفيذ وظائف متنوعة، تشمل على سبيل المثال لا الحصر، الطباعة ثلاثية الأبعاد، ومناولة المواد، واللحام، والنقش بالليزر. وهي قادرة على تحسين كفاءة ومرونة العمل والإنتاج بشكل كبير.
سمات

دقة عالية
قابلية التكرار
±0.02 مم
محور Z مخصص
0.1-0.8 متر
حمولة كبيرة
حامل 4 كجم
الحد الأقصى 5 كجم
سرعة أعلى
أقصى سرعة خطية 2 متر/ثانية
(حمولة حامل 5 كجم)
ذراع روبوت رباعي المحاور عالي الدقة وذو مدى حركة واسع وسهل الاستخدام
دقة عالية
قابلية التكرار: ±0.02 مم
طول الذراعين
المحور J1: 325 مم،المحور J2: 275 مم
محور Z مخصص
يمكن تخصيص شوط الحركة لأعلى ولأسفل بين 0.1 متر و 0.8 متر
موفر للمساحة
وحدة التحكم/المحرك مدمجة
بسيط وسهل الاستخدام
حتى المستخدم الجديد الذي لا يعرف شيئًا عن الذراع الروبوتية يمكنه استخدامها بسهولة، فالواجهة سهلة الاستخدام.
سرعة عالية
تبلغ سرعته 2000 مم/ثانية تحت حمل 4 كجم

المنتجات ذات الصلة



معلمات المواصفات
تم تصميم الروبوت التعاوني SCIC Hitbot Z-Arm 4160B من قبل شركة SCIC Tech، وهو خفيف الوزن وسهل البرمجة والاستخدام، ويدعم حزمة تطوير البرامج (SDK). بالإضافة إلى ذلك، فهو مزود بخاصية اكتشاف التصادم، أي أنه يتوقف تلقائيًا عند ملامسة الإنسان، مما يوفر تعاونًا ذكيًا بين الإنسان والآلة، مع مستوى عالٍ من الأمان.
| ذراع الروبوت التعاوني Z-Arm 4160B | حدود |
| طول ذراع المحور 1 | 325 مم |
| زاوية دوران المحور 1 | ±90° |
| طول ذراع المحورين | 275 مم |
| زاوية دوران محورين | ±164° اختياري: 15-345 درجة |
| شوط المحور Z | يمكن تخصيص ارتفاع 410 |
| نطاق دوران المحور R | ±1080° |
| السرعة الخطية | 2000 مم/ث (حمولة 4 كجم) |
| قابلية التكرار | ±0.02 مم |
| الحمولة القياسية | 4 كجم |
| الحمولة القصوى | 5 كجم |
| درجة الحرية | 4 |
| مزود الطاقة | 220 فولت/110 فولت 50-60 هرتز، قابل للتكيف مع 48 فولت تيار مستمر، طاقة قصوى 960 واط |
| تواصل | إيثرنت |
| قابلية التوسع | وحدة تحكم الحركة المدمجة توفر 24 منفذ إدخال/إخراج بالإضافة إلى إمكانية التوسعة تحت الذراع |
| يمكن تخصيص ارتفاع المحور Z | 0.1 متر ~ 0.8 متر |
| تعليم السحب على المحور Z | / |
| واجهة كهربائية محجوزة | التكوين القياسي: 24 سلكًا من نوع 23awg (غير محمية) من لوحة المقبس عبر غطاء الذراع السفلي اختياري: أنبوبان مفرغان بقطر 4 بوصات يمران عبر لوحة المقبس والشفة |
| مقابض كهربائية متوافقة مع HITBOT | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| ضوء التنفس | / |
| نطاق حركة الذراع الثاني | قياسي: ±164 درجة، اختياري: 15-345 درجة |
| ملحقات اختيارية | / |
| بيئة الاستخدام | درجة الحرارة المحيطة: 0-45 درجة مئوية الرطوبة: 20-80% رطوبة نسبية (بدون صقيع) |
| مدخل رقمي لمنفذ الإدخال/الإخراج (معزول) | 9+3+تمديد الساعد (اختياري) |
| مخرج رقمي لمنفذ الإدخال/الإخراج (معزول) | 9+3+تمديد الساعد (اختياري) |
| مدخل تناظري لمنفذ الإدخال/الإخراج (4-20 مللي أمبير) | / |
| مخرج تناظري لمنفذ الإدخال/الإخراج (4-20 مللي أمبير) | / |
| ارتفاع ذراع الروبوت | 860 مم |
| وزن ذراع الروبوت | شوط 410 مم، وزن صافٍ 36.5 كجم |
| حجم القاعدة | 250 مم × 250 مم × 15 مم |
| المسافة بين فتحات تثبيت القاعدة | 200 مم × 200 مم مع أربعة براغي M8 × 20 |
| كشف التصادم | √ |
| تعليم فنون الدراج | √ |
خيار مثالي لمهام التجميع الخفيفة
Z-Arm XX60B عبارة عن ذراع روبوت رباعي المحاور ذو مدى ذراع كبير، يشغل مساحة صغيرة، وهو مناسب جدًا لوضعه على محطة العمل أو داخل الآلة، وهو خيار مثالي لمهام التجميع الخفيفة.


خفيف الوزن مع زاوية دوران كبيرة

يبلغ وزن المنتج حوالي 36.5 كجم، ويمكن أن تصل حمولته القصوى إلى 5 كجم، وزاوية دوران المحور 1 هي ±90 درجة، وزاوية دوران المحور 2 هي ±164 درجة، ويمكن أن يصل نطاق دوران المحور R إلى ±1080 درجة.
مدى ذراع كبير، استخدام واسع

يتميز ذراع Z-Arm XX60B بمدى ذراع طويل، حيث يبلغ طول المحور 1 325 مم، وطول المحور 2 275 مم، ويمكن أن تصل سرعته الخطية إلى 2000 مم/ثانية تحت حمل 4 كجم.


سهولة النشر، وسرعة التبديل
يتميز ذراع Z-Arm XX60B بخفة الوزن، وتوفير المساحة، والمرونة في النشر، وهو مناسب للنشر في العديد من التطبيقات، ولن يغير تخطيط الإنتاج السابق، بما في ذلك سرعة تبديل تسلسل العملية وإكمال دفعات صغيرة من الإنتاج، وما إلى ذلك.
اسحب التدريس لإكمال البرنامج

يعتمد البرنامج على التصميم الجرافيكي، وقد وفر نقاطًا، وإشارة إخراج، ومقبضًا كهربائيًا، وصينية، وتأخيرًا، ومعالجة فرعية، وإعادة ضبط، ووحدات وظيفية أساسية أخرى، ويمكن للمستخدمين سحب الوحدة للتحكم في ذراع الروبوت في منطقة البرمجة، والواجهة بسيطة، لكن الوظيفة قوية.
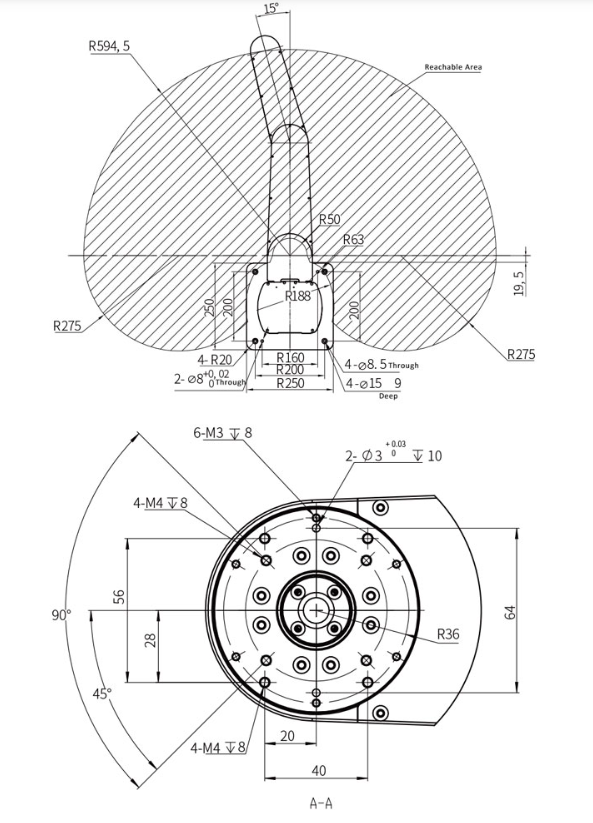
نطاق الحركة M1 الإصدار (الدوران للخارج)
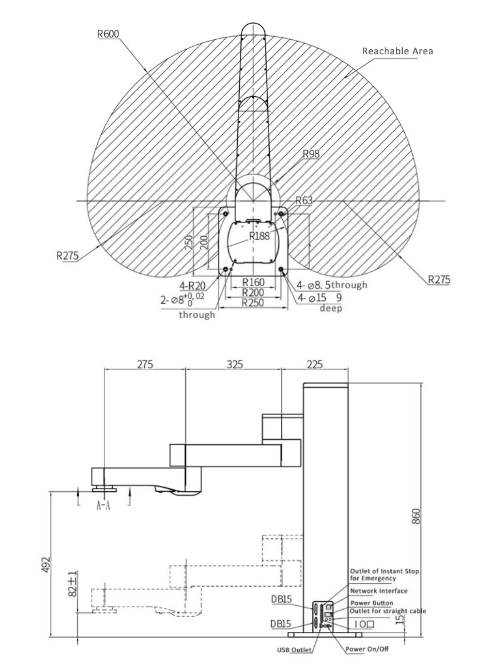
توصية بشأن موصل DB15

الموديل الموصى به: ذكر مطلي بالذهب مع غلاف من مادة ABS YL-SCD-15M، أنثى مطلية بالذهب مع غلاف من مادة ABS YL-SCD-15F
وصف المقاس: 55 مم × 43 مم × 16 مم
(انظر الشكل 5)
رسم تخطيطي لبيئة الاستخدام الخارجية لذراع الروبوت

أعمالنا


فئات المنتجات
-

سلسلة التغيير السريع - QC-150 دليل دائري...
-

روبوتات الرفع – روبوت الرفع الدوار SJV...
-

رافعة شوكية ذكية – SFL-CDD14-CE ليزر SLAM ...
-

سلسلة TM AI COBOT - روبوت TM12M ذو 6 محاور يعمل بالذكاء الاصطناعي
-

سلسلة TM AI COBOT - روبوت TM16M ذو 6 محاور يعمل بالذكاء الاصطناعي
-

سلسلة القابض الكهربائي هيتبوت – Z-EFG-30 بارال...